為甚麼沒有更多的機器人進入家庭?這個問題挺複雜。
自主機器人系統之所以能夠在倉庫和工廠車間蓬勃發展,很大程度上是因為在結構化環境中導航相對容易。與之相反,住宅是機器人的噩夢,不僅因環境迥異,充滿了不友好的障礙物,而且往往是動態的,因為家具會被移動,東西會被留在地板上。真空吸塵器是家庭中最常見的機器人,上市幾十年後仍在不斷改進。
科技網站TechCrunch報道,麻省理工大學(MIT)電腦科學人工智能實驗室(CSAIL)的研究人員最新推出一個PIGINet(計劃、圖像、目標和初始事實的英文縮寫)系統,旨在為家用機器人系統做任務和運動規劃。
該神經網絡旨在簡化機器人在不同環境中制定行動計劃的功能。研究人員解釋,「PIGINet採用多功能的先進編碼器模型,用於在數據序列上運行。在這裡,輸入序列是關於它正在考慮的任務計劃的信息、環境圖像以及初始狀態和預期目標的符號編碼。編碼器將任務計劃、圖像和文本結合起來,來預測所選任務計劃的可行性。」
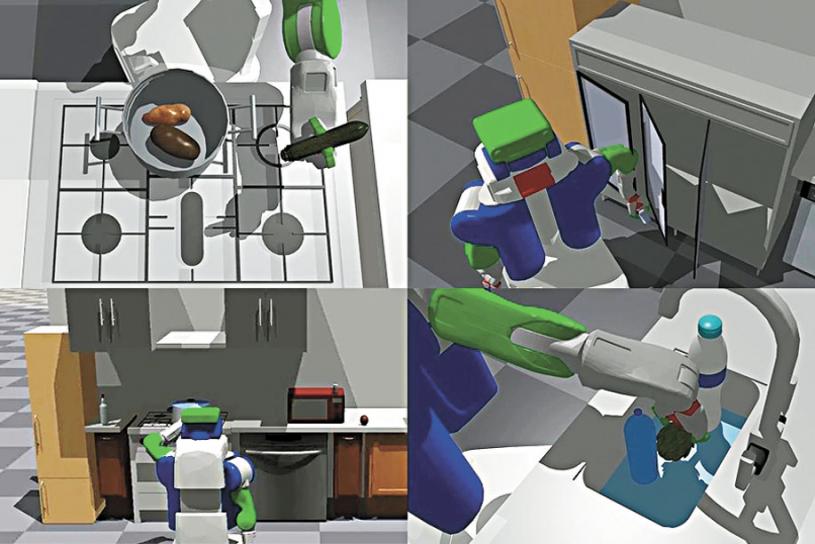
目前,該系統主要側重於廚房活動,它利用模擬家庭環境來構建需要與環境中各種不同元素(如檯面、櫥櫃、冰箱、水槽等)進行交互的計劃。研究人員稱,在較為簡單的情況下,PIGINet能夠將計劃時間縮短80%。對於較為複雜的情況,一般在可縮短20-50%左右。
研究團體認為,住房只是一個開始。「PIGINet的實際應用不僅限於家庭」。該團隊華裔博士生Zhutian Yang(音譯:楊諸天)說,「我們未來的目標是進一步完善PIGINet,在識別出不可行的行動後提出替代計劃,這將進一步加快生成可行的任務計劃,而無需大數據集從頭開始訓練通用規劃器。我們相信,這將徹底改變機器人在開發過程中的訓練方式,然後應用到每個人的家中。」